USB redriver: NB7VPQ904M 浅析
器件介绍
NB7VPQ904M 是一颗由 onsemi 的子公司 Semiconductor Components Industries, LLC 生产的 USB redriver 器件,其官方介绍是:
1.8V USB Type-C™ DisplayPort™ ALT Mode 10Gbps Linear Redriver
我们来逐字解析:
- 1.8V 指器件所需的供电电压;
- USB Type-C 是其所支持的 USB 接口形式;
- ALT Mode 指的是 Type-C 的备选模式(Alternate Mode),目前有五种备选模式规范:DisplayPort(即 DP 协议)备选模式,Mobile High-Definition Link 备选模式,Thunderbolt(即雷电协议)备选模式,HDMI 备选模式以及 VirtualLink 备选模式,而 NB7VPQ904M 这颗器件支持 DisplayPort 备选模式;
- 10Gbps 指的是 NB7VPQ904M 支持 USB 3.2 Gen 2 版本,并且向下兼容其他低版本;
- Linear Redriver 是这颗器件的具体身份。关于 redriver,网络上能找到多种翻译,有叫中继器,有叫调节器,也有暴力翻译为再驱动器的,为了保持严谨性,本文中不对该词汇进行翻译。众所周知,USB 3.2 基于自身的传输特性,在介质中传输时很容易受到各种干扰导致信号完整性下降,而 redriver 的工作就是对衰减的 USB 信号进行补偿,一定程度上解决或减轻信号完整性下降的问题。如果一颗 redriver 在一定的范围内输出与输入信号呈现近似的线性关系,则其为 Linear Redriver,这类 redriver 不会解决反射(Reflection)与串扰(Crosstalk),相反还会伴随主信号的放大而放大。
Pinout
NB7VPQ904M 没有公开其规格书,在网络上的资料几乎没有。不过我们仍然可以在大大通这个网站上找到一份有关 NB7VPQ904M 的硬件原理图:
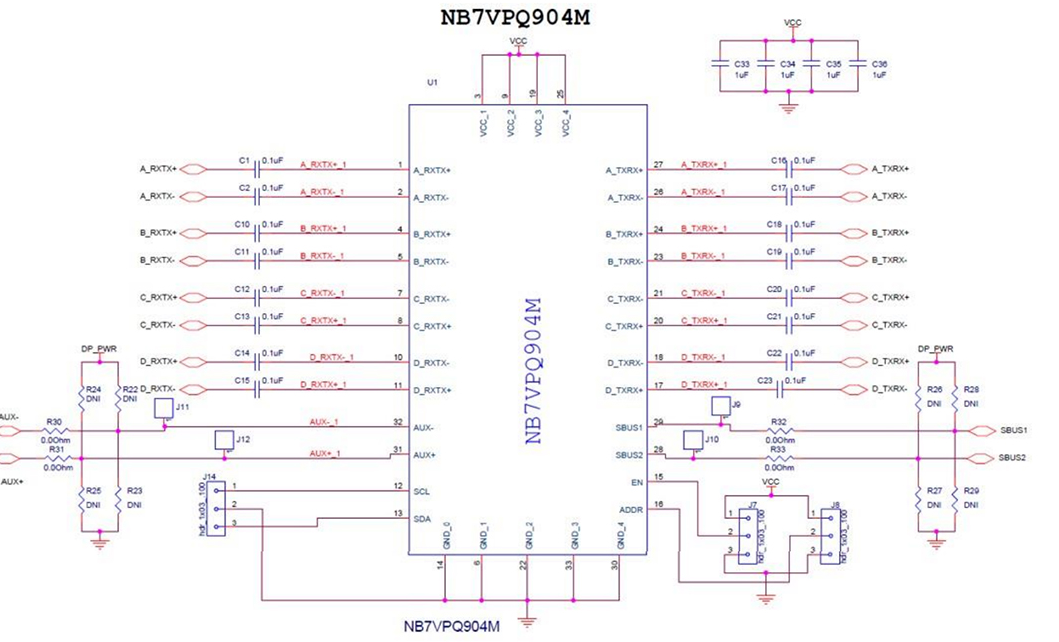
我们可以看到,该器件最重要的部分就是位于左右两侧的 USB 3.2 信号针脚,以 A_RXTX+ 为例:A 表示 A 通道,该器件一共四个通道,对应 Type-C 的四组差分线;RXTX 表示该针脚既可以作为发射端(Transmitter)也可以作为接收端(Receiver),另一端使用 TXRX 表示这两针脚是对应关系;+ 对应一组差分信号线中的正极。
实际设计中,我们会将 Type-C 的 TX1+/TX1-, RX1+/RX1-, TX2+/TX2-, RX2+/RX2- 分别连在左侧的四组通道上,将 SoC 的 USB 线路连接在右侧对应的通道上。
我们会发现,NB7VPQ904M 没有连接 Type-C 的 CC 针脚,这意味着 NB7VPQ904M 不具有识别正反插、备选模式的能力,那么 NB7VPQ904M 是如何正常工作的呢?
事实上,正反插和备选模式的识别都依赖 PMIC,在驱动中会注册一个回调函数接收来自 PMIC 的通知,由驱动主动设置 NB7VPQ904M 的寄存器来完成正反插的切换,以及 USB 模式和备选模式的切换。
驱动
NB7VPQ904M 几乎是高通平台的御用 redriver,你可以在几乎任何高通平台的源代码中找到一个名为 ssusb-redriver-nb7vpq904m.c 的驱动。这里以 Realme 的开源仓库为例,该驱动文件的 Github 链接可以在此处找到,其设备树配置可以参考同仓库中的 sm8150-qrd.dtsi 文件。本文中所有的源代码都出自 Realme 开源仓库。
首先我们看到设备树中的 extcon 属性:
1
2
3
4
5
6
redriver@19 {
compatible = "onnn,redriver";
reg = <0x19>;
extcon = <&pm8150b_pdphy>, <&pm8150b_pdphy>;
...
};
extcon 即 External Connector,直译为外部连接器,对于 USB 相关器件而言,是在器件自身不支持检测 USB 状态的情况下,通过一些外部的机制来通知 USB 状态变化的机制,常见的主要分为通过 GPIO 通知以及通过 PMIC 通知。对于 NB7VPQ904M 而言,其 extcon 是 PM8150B 这颗 PMIC 器件。
我们接着来关注驱动中的 ssusb_redriver_extcon_register 函数:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
static int ssusb_redriver_extcon_register(struct ssusb_redriver *redriver)
{
struct device_node *node = redriver->dev->of_node;
struct extcon_dev *edev;
int ret = 0;
if (!of_find_property(node, "extcon", NULL)) {
dev_err(redriver->dev, "failed to get extcon for redriver\n");
return 0;
}
edev = extcon_get_edev_by_phandle(redriver->dev, 0);
if (IS_ERR(edev) && PTR_ERR(edev) != -ENODEV) {
dev_err(redriver->dev, "failed to get phandle for redriver\n");
return PTR_ERR(edev);
}
if (!IS_ERR(edev)) {
redriver->extcon_usb = edev;
redriver->vbus_nb.notifier_call = ssusb_redriver_vbus_notifier;
redriver->vbus_nb.priority = NOTIFIER_PRIORITY;
ret = extcon_register_notifier(edev, EXTCON_USB,
&redriver->vbus_nb);
if (ret < 0) {
dev_err(redriver->dev,
"failed to register notifier for redriver\n");
return ret;
}
redriver->id_nb.notifier_call = ssusb_redriver_id_notifier;
redriver->id_nb.priority = NOTIFIER_PRIORITY;
ret = extcon_register_notifier(edev, EXTCON_USB_HOST,
&redriver->id_nb);
if (ret < 0) {
dev_err(redriver->dev,
"failed to register notifier for USB-HOST\n");
goto err;
}
}
edev = NULL;
/* Use optional phandle (index 1) for DP lane events */
if (of_count_phandle_with_args(node, "extcon", NULL) > 1) {
edev = extcon_get_edev_by_phandle(redriver->dev, 1);
if (IS_ERR(edev) && PTR_ERR(edev) != -ENODEV) {
ret = PTR_ERR(edev);
goto err1;
}
}
if (!IS_ERR_OR_NULL(edev)) {
redriver->extcon_dp = edev;
redriver->dp_nb.notifier_call =
ssusb_redriver_dp_notifier;
redriver->dp_nb.priority = NOTIFIER_PRIORITY;
ret = extcon_register_blocking_notifier(edev, EXTCON_DISP_DP,
&redriver->dp_nb);
if (ret < 0) {
dev_err(redriver->dev,
"failed to register blocking notifier\n");
goto err1;
}
}
/* Update initial VBUS/ID state from extcon */
if (extcon_get_state(redriver->extcon_usb, EXTCON_USB))
ssusb_redriver_vbus_notifier(&redriver->vbus_nb, true,
redriver->extcon_usb);
else if (extcon_get_state(redriver->extcon_usb, EXTCON_USB_HOST))
ssusb_redriver_id_notifier(&redriver->id_nb, true,
redriver->extcon_usb);
return 0;
err1:
if (redriver->extcon_usb)
extcon_unregister_notifier(redriver->extcon_usb,
EXTCON_USB_HOST, &redriver->id_nb);
err:
if (redriver->extcon_usb)
extcon_unregister_notifier(redriver->extcon_usb,
EXTCON_USB, &redriver->vbus_nb);
return ret;
}
在这个函数中,驱动向 extcon 注册了三个函数:ssusb_redriver_vbus_notifier, ssusb_redriver_id_notifier 和 ssusb_redriver_dp_notifier,分别用以接收 VBUS 状态变化(USB 拔插),ID 变化(主从切换)及 DP 变化(替代模式切换)。这三个函数中做的都是基础处理,复杂的处理都依靠工作队列机制交给了 redriver->config_work 来做:
1
queue_work(redriver->redriver_wq, &redriver->config_work);
这个工作队列的注册可以在 redriver_i2c_probe 中找到:
1
INIT_WORK(&redriver->config_work, ssusb_redriver_config_work);
ssusb_redriver_config_work 这个函数根据 extcon 提供的信息具体分析了主从、正反插等状态,之后通过 ssusb_redriver_gen_dev_set 这个函数设置到 NB7VPQ904M 的寄存器中:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
static void ssusb_redriver_gen_dev_set(
struct ssusb_redriver *redriver, bool on)
{
int ret;
u8 val;
val = 0;
switch (redriver->op_mode) {
case OP_MODE_USB:
/* Use source side I/O mapping */
if (redriver->typec_orientation
== ORIENTATION_CC1) {
/* Enable channel C and D */
val &= ~(CHNA_EN | CHNB_EN);
val |= (CHNC_EN | CHND_EN);
} else if (redriver->typec_orientation
== ORIENTATION_CC2) {
/* Enable channel A and B*/
val |= (CHNA_EN | CHNB_EN);
val &= ~(CHNC_EN | CHND_EN);
} else {
/* Enable channel A, B, C and D */
val |= (CHNA_EN | CHNB_EN);
val |= (CHNC_EN | CHND_EN);
}
/* Set to default USB Mode */
val |= (0x5 << OP_MODE_SHIFT);
break;
case OP_MODE_DP:
/* Enable channel A, B, C and D */
val |= (CHNA_EN | CHNB_EN);
val |= (CHNC_EN | CHND_EN);
/* Set to DP 4 Lane Mode (OP Mode 2) */
val |= (0x2 << OP_MODE_SHIFT);
break;
case OP_MODE_USB_AND_DP:
/* Enable channel A, B, C and D */
val |= (CHNA_EN | CHNB_EN);
val |= (CHNC_EN | CHND_EN);
if (redriver->typec_orientation
== ORIENTATION_CC1)
/* Set to DP 4 Lane Mode (OP Mode 1) */
val |= (0x1 << OP_MODE_SHIFT);
else if (redriver->typec_orientation
== ORIENTATION_CC2)
/* Set to DP 4 Lane Mode (OP Mode 0) */
val |= (0x0 << OP_MODE_SHIFT);
else {
dev_err(redriver->dev,
"can't get orientation, op mode %d\n",
redriver->op_mode);
goto err_exit;
}
break;
default:
dev_err(redriver->dev,
"Error: op mode: %d, vbus: %d, host: %d.\n",
redriver->op_mode, redriver->vbus_active,
redriver->host_active);
goto err_exit;
}
/* exit/enter deep-sleep power mode */
if (on)
val |= CHIP_EN;
else
val &= ~CHIP_EN;
ret = redriver_i2c_reg_set(redriver, GEN_DEV_SET_REG, val);
if (ret < 0)
goto err_exit;
dev_dbg(redriver->dev,
"successfully (%s) the redriver chip, reg 0x00 = 0x%x\n",
on ? "ENABLE":"DISABLE", val);
return;
err_exit:
dev_err(redriver->dev,
"failure to (%s) the redriver chip, reg 0x00 = 0x%x\n",
on ? "ENABLE":"DISABLE", val);
}
注意下面这段代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
case OP_MODE_USB:
/* Use source side I/O mapping */
if (redriver->typec_orientation
== ORIENTATION_CC1) {
/* Enable channel C and D */
val &= ~(CHNA_EN | CHNB_EN);
val |= (CHNC_EN | CHND_EN);
} else if (redriver->typec_orientation
== ORIENTATION_CC2) {
/* Enable channel A and B*/
val |= (CHNA_EN | CHNB_EN);
val &= ~(CHNC_EN | CHND_EN);
} else {
/* Enable channel A, B, C and D */
val |= (CHNA_EN | CHNB_EN);
val |= (CHNC_EN | CHND_EN);
}
/* Set to default USB Mode */
val |= (0x5 << OP_MODE_SHIFT);
break;
这一段代码是仅 USB 模式下的寄存器配置。我们可以看到,它在检测到方向为 CC1 时,打开了 C/D 通道,检测到方向为 CC2 时,打开了 A/B 通道,也就是说驱动默认你将 Type-C 的 TX1/RX1 接在 C/D 通道,而 TX2/RX2 接在 A/B 通道。通常来说,建议硬件上将 A/B/C/D 四个通道分别连接到 RX1/TX1/TX2/RX2,因为这是这颗芯片的默认配置,哪怕芯片驱动出现异常,也能保证 USB 3.0 能够正常工作。注意到有配置 (0x5 << OP_MODE_SHIFT),由于这个模式下只有 USB,可推测该值对应的模式为四通道 USB。
再看到这一段代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
case OP_MODE_USB_AND_DP:
/* Enable channel A, B, C and D */
val |= (CHNA_EN | CHNB_EN);
val |= (CHNC_EN | CHND_EN);
if (redriver->typec_orientation
== ORIENTATION_CC1)
/* Set to DP 4 Lane Mode (OP Mode 1) */
val |= (0x1 << OP_MODE_SHIFT);
else if (redriver->typec_orientation
== ORIENTATION_CC2)
/* Set to DP 4 Lane Mode (OP Mode 0) */
val |= (0x0 << OP_MODE_SHIFT);
else {
dev_err(redriver->dev,
"can't get orientation, op mode %d\n",
redriver->op_mode);
goto err_exit;
}
break;
这一段常用在眼镜类的产品上,将 Type-C 的四组通道拆分,两组供给 USB 3.1 使用,另外两组供给 DP 使用,因此我们可以看到代码中将 A/B/C/D 四个通道都打开了。另一方面,对于 CC1/CC2,驱动还配置了不同的 OP_MODE,我们可以猜测,设置 (0x1 << OP_MODE_SHIFT) 意味着将 C/D 通道配置为 USB 3.1,A/B 通道配置为 DP;反过来说,设置 (0x0 << OP_MODE_SHIFT) 可以猜测是将 A/B 通道配置为 USB 3.1,C/D 通道配置为 DP。
最后看到中间这段代码:
1
2
3
4
5
6
7
8
9
case OP_MODE_DP:
/* Enable channel A, B, C and D */
val |= (CHNA_EN | CHNB_EN);
val |= (CHNC_EN | CHND_EN);
/* Set to DP 4 Lane Mode (OP Mode 2) */
val |= (0x2 << OP_MODE_SHIFT);
break;
由于该模式仅有 DP,因此可推测 (0x2 << OP_MODE_SHIFT) 是四通道 DP 模式。
参考
Differences between linear and limiting redrivers - David Liu, Malik Barton